Project in collaboration with CSEM
Project description
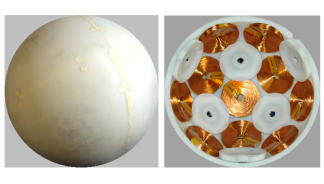
A reaction sphere is proposed as a potential alternative to traditional Attitude and Orbit Control System (AOCS) actuators based on reaction wheels or control moment gyroscopes. The reaction sphere is a magnetic-bearing spherical actuator consisting of an 8-pole permanent-magnet spherical rotor that can be accelerated about any axis by a 20-pole stator with air-core electromagnets. A research prototype equipped with dedicated power electronics is manufactured to validate force and torque analytical models.
Publications
Force and Torque Model of Ironless Passive Magnetic Bearing Structures
G. B. Gallego; L. Rossini; T. Achtnich; C. Zwyssig; D. M. Araujo et al.
2019-01-01. 11th IEEE International Electric Machines and Drives Conference (IEMDC), San Diego, CA, May 12-15, 2019. p. 507-514. DOI : 10.1109/IEMDC.2019.8785411. Force Analysis of a Slotless Lorentz-Type Active Magnetic Bearing Actuator
G. Borque Gallego; L. Rossini; T. Achtnich; C. Zwyssig; D. Martins Araujo et al.
2018. The 2018 International Conference on Electrical Machines and Systems (ICEMS2018), Jeju, South Korea, October 7-10, 2018. p. 75-80. DOI : 10.23919/ICEMS.2018.8549038. Closed-loop magnetic bearing and angular velocity control of a reaction sphere actuator
L. Rossini; E. Onillon; O. Chetelat; Y. Perriard
Mechatronics. 2015. Vol. 30, p. 214-224. DOI : 10.1016/j.mechatronics.2015.07.003. Back-EMF and Rotor Angular Velocity Estimation for a Reaction Sphere Actuator
L. Rossini; E. Onillon; O. Chételat; Y. Perriard
2014. AIM 2014, IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besançon, France, July 8-11, 2014. p. 334-339. DOI : 10.1109/AIM.2014.6878101. Electromagnetic Modeling and Control Aspects of a Reaction Sphere for Satellite Attitude Control
L. Rossini / Y. Perriard (Dir.)
Lausanne, EPFL, 2014. Hybrid FEM-analytical force and torque models of a reaction sphere actuator
L. Rossini; E. Onillon; O. Chetelat; Y. Perriard
2013. 2013 IEEE International Electric Machines and Drives Conference, IEMDC 2013, Chicago, IL, United States, May 12 – 15, 2013. p. 694-700. DOI : 10.1109/IEMDC.2013.6556169. Force and Torque Analytical Models of a Reaction Sphere Actuator Based on Spherical Harmonic Rotation and Decomposition
L. Rossini; O. Chetelat; E. Onillon; Y. Perriard
IEEE/ASME Transactions on Mechatronics 1. 2013. Vol. 18, num. 3, p. 1006-1018. DOI : 10.1109/Tmech.2012.2195501. An Optimal Sensor Placement Strategy for Force and Torque Analytical Models of a Reaction Sphere Actuator for Satellite Attitude Control
L. Rossini; E. Onillon; O. Chetelat; Y. Perriard
2012. ICEM, Marseille, p. 2545-2551. DOI : 10.1109/ICElMach.2012.6350243. An open-loop control strategy of a reaction sphere for satellite attitude control
L. Rossini; E. Onillon; O. Chetelat; Y. Perriard
2011. International Conference on Electrical Machines and Systems (ICEMS), Beijing, China, 2011. DOI : 10.1109/ICEMS.2011.6073912. Analytical and experimental investigation on the force and torque of a reaction sphere for satellite attitude control
L. Rossini; O. Chetelat; E. Onillon; Y. Perriard
2011. IEEE/ASME International Conference on Advanced Intelligent Mechatronics 2011, Budapest, Hungary, 2011. p. 487-492. DOI : 10.1109/AIM.2011.6026980.