Project in collaboration with a foreign industrial partner
Project description
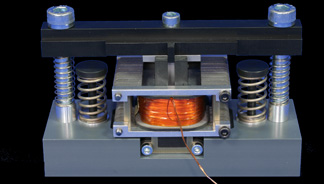
A linear electromechanical actuator is designed, capable of satisfying a desired profile of the mover position in function of time. The LAI developed its own optimization method in which the optimization constraints are critical points of the function position(time). The mover position is estimated by superposing an additional (scan) voltage to the main voltage used to power the coil, in order to achieve the sensorless position control.
Publications
Sensorless Position Detection of a Linear Actuator
N. Katic
2009. Control of velocity for a linear actuator
S. Kull
2010. Modélisation SIMULINK d’une microcentrale solaire thermique de faible puissance (2-10KW) qui alimentera un reseau ilote
M. Betschart
2008. Optimization of a BLDC motor using a genetic algorithm
M. Roulet
2010. Conception et développement d’un système de Sun Tracking pour centrale solaire
M. Baillifard
2008. Modélisation et optimisation d’un actionneur linéaire
M. Betschart
2009. Développement d’une électronique de commande permettant de contôler en position et en vitesse un contacteur
L. Vionnet
2008. Design for Self-Sensing of a Linear Actuator
J. Maridor; M. Markovic; Y. Perriard
2011. IEEE Energy Conversion Congress and Exposition (ECCE), Phoenix, AR, Sep 17-22, 2011. p. 1510-1514. DOI : 10.1109/ECCE.2011.6063960. Sensorless position detection of a linear actuator using the resonance frequency
J. Maridor; N. Katic; Y. Perriard; D. Ladas
2009. 12th International Conference on Electrical Machines and Systems, Tokyo, JAPAN, Nov 15-18, 2009. p. 1032-1037. DOI : 10.1109/ICEMS.2009.5382641.