CTI project in collaboration with a Swiss industrial partner
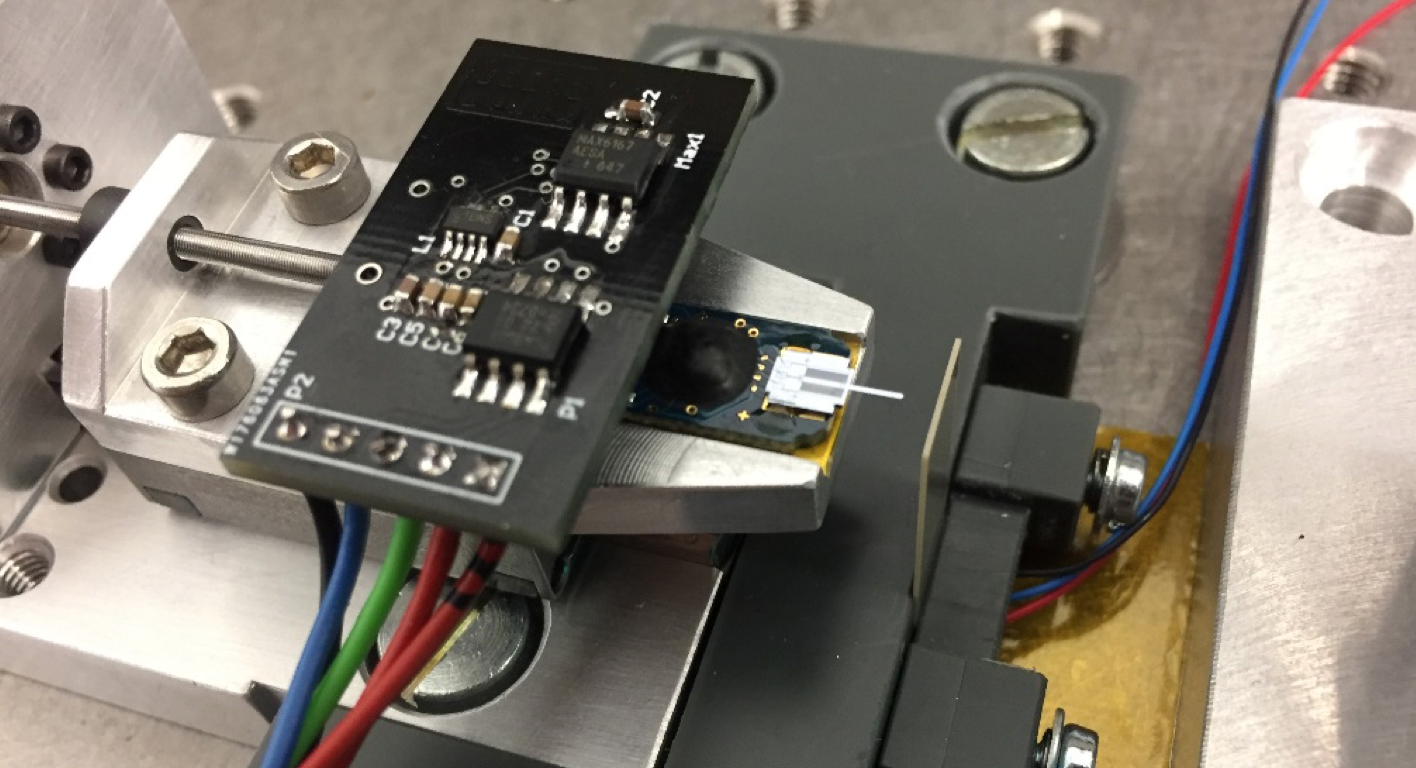
Test bench for force measurement on a piezoelectrical cantilever.
Project description
The aim of the project is to develop a muti-degrees of freedom piezo-based robotic wrist providing positioning and force sensing capabilities at submicron scale. In order to keep the wrist dimensions very compact (< 2 cm3), the Integrated Actuator Laboratory (LAI) investigates the possibility to make use of sensorless actuation technologies.
Publications
Sensorless Quasi-static Piezoelectric Actuator for Micro-Robotics
2019-01-01.22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, PEOPLES R CHINA, Aug 11-14, 2019. p. 1498-1502. DOI : 10.1109/ICEMS.2019.8922397.
2019-01-01.12th International Symposium on Linear Drives for Industry Applications (LDIA), Neuchatel, SWITZERLAND, Jul 01-03, 2019. DOI : 10.1109/LDIA.2019.8771007.
2018.2018 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Nagoya, Japan, July 4 -8, 2018. DOI : 10.1109/MARSS.2018.8481181.