Integrated actuators – Prof. Y. Perriard
Note: Projects are intended for Microengineering, Electrical Engineering, Computer Science and Mechanical Engineering sections.
For information and registrations contact:
- Prof. Yves Perriard at: [email protected]
- Paolo Germano at: [email protected]
Transportation fees between EPFL and Neuchâtel will be covered.
- 1. Self-Sensing for dielectric elastomer actuators
- Simon Holzer
Dielectric Elastomer Actuators (DEAs) are deformable materials frequently employed in soft robotics, distinguished by high energy density. Often referred to artificial muscles, they deform based on the electrostatic principle, where the application of high voltage induces thickness reduction which will lead to an increase of surface in the other directions.
This project aims to apply self-sensing in soft robotics to ascertain the state of the DEAs. Self-sensing is defined as sensing the state of the actuator during actuation without the use of additional sensors (also called sensor-less sensing). The project includes studies on the state of the art, implementing the code (LabView/Python or others) for the chosen method and test the functionality by experiments. The experiments will include tests with changing stiffness which should be determined. The stiffness will be adapted by example by affixing various rigid materials, potentially of biological origin, to the surface and determine these changes in rigidity.
The following tasks will be done during your project:
– Performing a state of the art about existing self-sensing technologies
– Choice and implementation of a promising self-sensing method
– Experiments on existing DEA platforms to show abilities of the implemented method
– Writing project report
Keywords: Self-sensing, soft robotics, biomedical engineering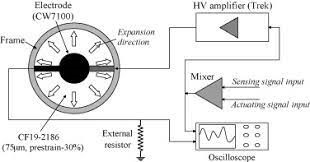
[1]
[1]: Kwangmok Jung, Kwang J. Kim, Hyouk Ryeol Choi (2008), A self-sensing dielectric elastomer actuator in Sensors and Actuators A: Physical, Volume 143, Issue 2, https://doi.org/10.1016/j.sna.2007.10.076.
. - 2. Transparent Electrodes for dielectric elastomer actuators
- Simon Holzer
Dielectric Elastomer Actuators (DEAs) represent a type of artificial muscle stimulated by high voltage. The applied high voltage generates a Maxwell pressure, resulting in DEA deformation. The electrodes of the DEA play a pivotal role, influencing the generated electric field through their shape, material and other properties. Frequently employed electrodes for DEAs, based on carbon or silver, are often opaque and do not permit light transmission [1].
This project focuses on developing DEAs with transparent stretchable electrodes. This involves determining the appropriate material, developing a subsequent process for transparent DEA fabrication, and conducting various tests on the electrodes to analyse their behaviour in comparison to traditionally used electrodes. The fabrication of the electrodes will be conducted in-house within a cleanroom and different technologies like blade casting, pad printing or inkjet printing are possible to be used. For you, this project provides an opportunity for initial experiences in a cleanroom environment and the possibility to work with state-of-the-art manufacturing processes utilized in the field of soft robotics.
The following tasks will be done during your project:
– Performing a literature review about existing stretchable transparent electrodes
– Development of a fabrication strategy for a transparent electrode on PDMS
– Testing of properties and functionality of developed transparent electrode
– Writing project report
Keywords: Transparent stretchable electrodes, Cleanroom, soft robotics
[1]: Rosset, S., Shea, H.R. (2013) Flexible and stretchable electrodes for dielectric elastomer actuators. In Appl. Phys. A 110, 281–307. https://doi.org/10.1007/s00339-012-7402-8
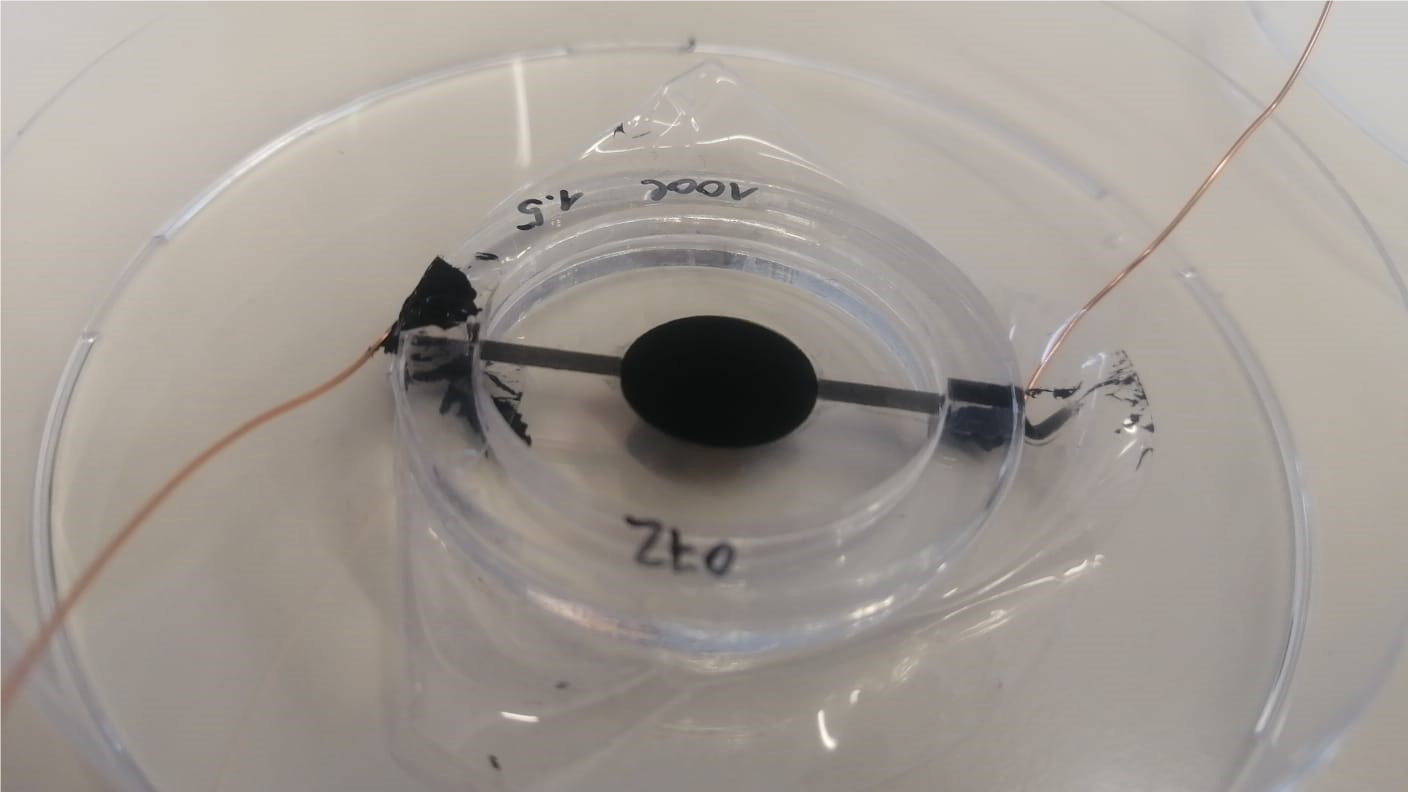
. - 3. Influence of electric fields on human cells
- Simon Holzer

To enhance the understanding of biological systems and contribute to drug development, reliance on animal experiments is prevalent today. However, many animal experiments lack conclusiveness, and the drugs developed through them often exhibit no or varying effects in humans. Cell cultures offer a promising alternative to animal experiments. Attempts are made to test drugs directly on the cells intended for later treatment, aiming to enable personalized medicine. Nevertheless, certain cells that dedifferentiate in a static cell culture. Rresearchers have found that this can be circumvented through additional stimulation, such as mechanical stimulation [1].
At the Centre for Artificial Muscles (CAM), devices based on a Dielectric Elastomer Actuator (DEA) are being developed [2]. DEAs are stimulated by high electrical voltage, resulting in an electric field primarily collected between the electrodes. Though small leakages of the field may occur.
The goal of this project is to determine the impact of these leakages. The following tasks will be done during your project:
– Performing a state of the art about the influence of electric fields on human cells
– Development of a rigid device design, similar to existing soft robotic device design
– Determine electric fields with the help of an implemented test setup to compare with soft actuators
– Writing project report
Keywords: Biotechnology, cell cultures, electric field leakages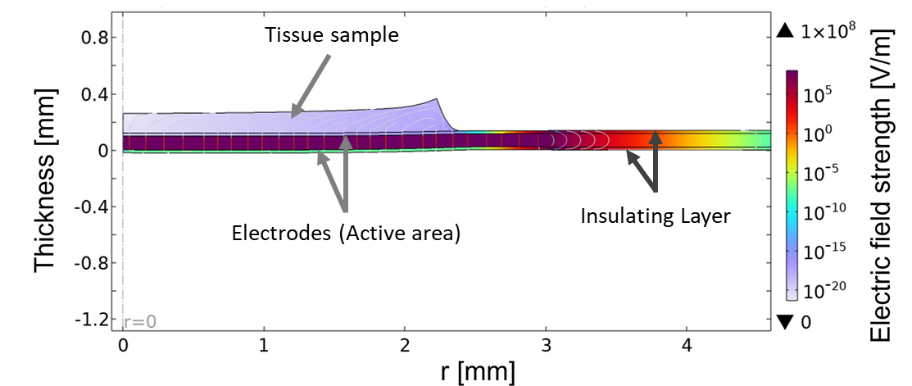
[1]: Thompson Clare L., Fu Su, Heywood Hannah K., Knight Martin M., Thorpe Stephen D. (2020) Mechanical Stimulation: A Crucial Element of Organ-on-Chip Models in Frontiers in Bioengineering and Biotechnology 8, DOI=10.3389/fbioe.2020.602646
[2]: Martinez, Thomas, Chavanne, Jonathan, Walter, Armando, Civet, Yoan and Perriard, Yves (2021) Design and modelling of a tubular dielectric elastomer actuator with constrained radial displacement as a cardiac assist device in Smart Materials and Structures 30, DOI:10.1088/1361-665X/ac1fa8}
. - 4. Pad printing of large electrodes for dielectric elastomer actuators
- Simon Holzer, Armando Walter
Dielectric elastomer actuators (DEAs) are soft actuators which are used in many different fields like artificial muscles [1]. Various fabrication techniques exist for DEAs. A technique which allows high throughput together with high precision is pad printing. Pad printing is a printing technique that transfers ink from an engraved plate to a silicone pad, which then imprints the image onto the wanted surface. Pad printing is rarely used for the fabrication and the standard inks used in the fabrication for DEAs are not well adapted for Pad Printing.
Therefore, the aim of this project is to investigate the ink formulation used for Pad Printing. The following tasks will be done during your project:
– Performing a state of the art about inks used for printing technologies with focus on Pad Printing
– Investigation of an ink useful for printing of DEAs
– Determination of parameters of the investigated ink (electrical and mechanical properties of printed electrodes)
– Writing project report
Keywords: Printing electronic devices, Cleanroom, Soft robotics
[1]: Martinez, Thomas, Chavanne, Jonathan, Walter, Armando, Civet, Yoan and Perriard, Yves (2021) Design and modelling of a tubular dielectric elastomer actuator with constrained radial displacement as a cardiac assist device in Smart Materials and Structures 30, DOI:10.1088/1361-665X/ac1fa8}
. - 5. Control and Implementation of a soft planar actuator for a precise assembly station
- Simon Holzer, Bhawnath Tiwari
In the recent years various micro assembly stations are developed which are used to address wide range of needs such as high precision, stroke, speed etc. Planar actuators based on soft actuators can provide several advantages including light weight, higher stroke and stress withstanding [1]. Through this study we aim to develop and advance the control scheme of the already developed planar soft actuator. The successful student would study and analyse the planar actuator, master the system handling by establishing an appropriate control to ensure precise trajectory generation.
The following tasks will be done during your project:
– Performing a state of the art about existing micro assembly stations and their limitations
– Establish an appropriate control of the device in MATLAB/LabView/Python.
– Experiments on existing DEA platforms to apply established control algorithm
– Writing project report
Keywords: Control strategies, soft robotics, signal processing
Conventional two-axis ultra-precision planar air-bearing stage
[1]: Guo, Y., Liu, L., Liu, Y. and Leng, J. (2021), Review of Dielectric Elastomer Actuators and Their Applications in Soft Robots. Adv. Intell. Syst., 3: 2000282. https://doi.org/10.1002/aisy.202000282
[2]: https://www.aerotech.com/product/stages-actuators/planarhdx-two-axis-silicon-carbide-planar-air-bearing-stage/ (21.11.2023)
. - 6. Constant Force Actuator
- Paolo Germano, Christian Koechli

In the frame of the development of a medical foot pressure releasing linear valve (Fig. 1), there is a need of mechanically loading the device with a constant force independently of the stroke. Commonly, weights of different sizes are used but are not really convenient (Fig. 2). The aim of the project is to develop a voice-coil based (or any suitable) loader to be able to easily characterize the developed valve. Low stroke and high force are the main specifications as well as control linearity.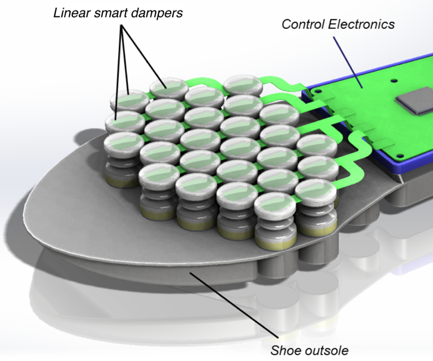
Fig. 1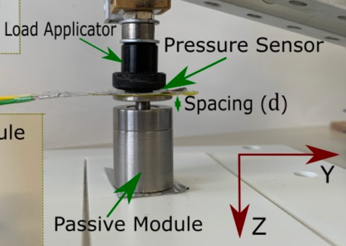
Fig. 2
. - 7. Design and control of a humanoid facial robot
- Stefania Konstantinidi
In the Centre for Artificial Muscles (CAM) and LAI, we are currently developing a device to reanimate facial expressions for patients suffering from facial paralysis. The work uses soft actuators, namely DEAs, to replace the paralyzed facial muscles. The coordination and control of several muscles is necessary to achieve natural facial expressions. Facial muscles of interest include, among others, the muscles responsible for the movement of the mouth (lower facial expressions), of the eyebrows and forehead (higher expressions), and orbital muscles to blink (lifting the eyelids).
The aim of this project is to design and fabricate a humanoid facial setup, targeted at a chosen muscle in order to operate the actuator and have a realistic facial movements.
. - 8. Modelling and fabrication of fibre reinforced actuators
- Stefania Konstantinidi
Dielectric Elastomer Actuators (DEAs) are a recent type of smart materials that show impressive performances as soft actuators. The deformation of DEAs can be configured to adapt for different applications, for example by forming them into a tubular shape to generate a radial expansion. However, implementing DEAs that mimic natural muscles has been proven difficult, as DEAs provide in-plane expansion when actuated, while natural muscles contract upon stimulation. Embedding fibres within the DEA allows to alter the DEA mechanical characteristics to obtain an anisotropic movement, such as a movement of contractile nature. The thickness, spacing as well as the geometry of the fibres affect the performance of the DEA.
The aim of this project is to design and fabricate fibre reinforced DEAs in order to achieve a contraction movement.
. - 9. Structured auxetic fibre reinforced actuators
- Stefania Konstantinidi
Implementing dielectric elastomer actuators (DEAs) that mimic natural muscles has been proven difficult, as DEAs provide in-plane expansion when actuated, while natural muscles contract upon stimulation. Multiple solutions can be found in literature, namely stack DEAs and fiber reinforced DEAs. Currently, the fibers used for DEAs to achieve contractile motion rely on a fishnet design. An optimization of the fiber structure is proposed for this project, with structures generated by topology optimization, which is a powerful design approach aiming at an objective by investigating the distribution of the material inside a discretized design space. The use of structured fiber sheets embedded in DEAs is a novel approach allowing to explore more complex configurations. Structured sheets can be described as materials whose microstructure is controlled in order to achieved a desired macroscopic mechanical and deformative behavior. Their design is very complex and interesting and can be performed by mapping the meso-scale mechanical behavior to the macro-scale behavior. This work will innovate by presenting contractile DEAs by embedding such soft structured fiber sheets in the actuators.
The aim of this project is to design, fabricate and characterize fibre reinforced DEAs in order to achieve a contraction movement.
. - 10. Inkjet printing of fibre reinforced actuators
- Stefania Konstantinidi, Armando Walter
Additive Manufacturing is the process of adding material layer by layer to produce 2.5 or 3D structures and it enables the production of complex soft machines.
In this project, you will use our newly received inkjet printer to fabricate fibre reinfored soft actuators. After formulating the inks to achieve the targeted fibre mechanical properties, the fibres and actuator will be printed and characterized.
The state of the art for the existing inks and fabrication processes will first be established, followed by the implemention of the fabrication process.
During the project, you will work in a cleanroom (grey room) environment.
.
- 11. Designing a Kirigami-Inspired SMA-Based Structure for Actuation
- Marjan Ghorbani
Background:
Shape memory alloys (SMAs) are popular as actuators for soft bioinspired robots because they are naturally compliant, have high work density, have a wide range of applications from aerospace to the medical industry, and can be operated using minimized onboard electronics for power and control. Shape memory alloys are interesting because of their unique characteristic which is remembering their initial shape.
Objective:
The objective of this semester project is to explore and design a Shape Memory Alloy (SMA)-based actuation structure inspired by Kirigami, integrating COMSOL Multiphysics simulation. The project aims to leverage the unique properties of SMAs, coupled with Kirigami’s patterns, to create an innovative actuation system with improved behavior compared to conventional designs.
To do so, the student will be asked to design and simulate different patterns in terms of mechanical and thermal behavior to generate the required force and actuate in the desired time. In another way, the proposed pattern should be optimized enough to deliver the requirements. The student will also have the opportunity to experience different aspects of SMAs which are one of the most applicable alloys in the different fields of the novel industry.
The proposed project comprises different steps:
1. Literature Review: Conduct an in-depth review of existing literature on Shape Memory Alloys, Kirigami structures, and COMSOL simulation. Understand the principles, challenges, and opportunities associated with combining these technologies.
2. Conceptual Design: Develop conceptual designs for the Kirigami-inspired SMA-based actuation structure, considering different cutting patterns.
3. COMSOL Multiphysics Simulation: Create a virtual model of the Kirigami-inspired SMA structure using COMSOL Multiphysics. Simulate the mechanical and thermal behavior of the structure and correlate the simulation results with experimental findings.
4. Fabrication and Prototyping: Fabricate prototypes of the proposed Kirigami-inspired SMA structure. Utilize manufacturing techniques, such as laser cutting, for precision in Kirigami patterns.
5. Actuation Testing: Conduct experiments to evaluate the designed structure performance. Investigate factors such as response time, force generation, and repeatability. Adjust the design based on both experimental and simulation results.
6. Analysis and Optimization: Perform structural and thermal analyses using COMSOL to understand the behavior of the Kirigami-inspired SMA structure. Optimize the design based on the combined insights from experimental and simulated data.
7. Final Report and Presentation: Document the entire design process, including literature review, conceptual design, simulation, fabrication, testing, and analysis. Prepare a comprehensive report and deliver a presentation summarizing key findings and the significance of the designed structure.
Expected Outcomes:
1. A Kirigami-inspired SMA-based actuation structure with demonstrated capabilities.
2. Correlation between COMSOL simulation and experimental results.
3. Insights into the integration of Kirigami, SMAs, and COMSOL for innovative engineering applications.
4. Recommendations for further improvements and potential applications.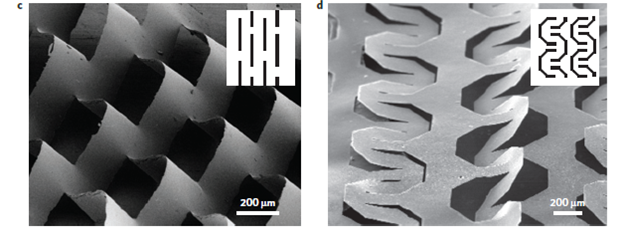
Figure 1. Kirigami inspired patterns [1]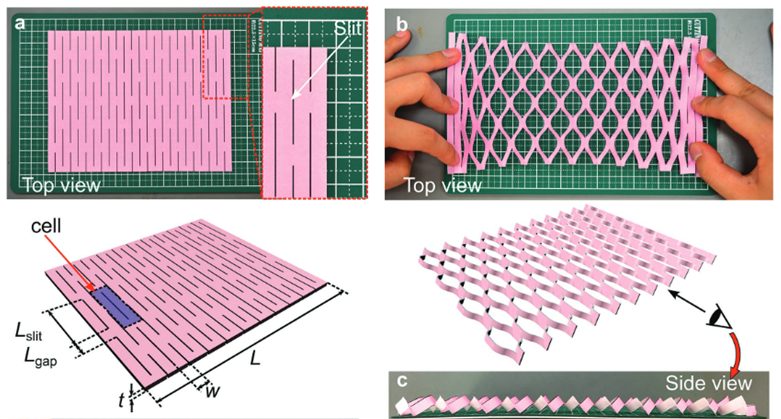
Figure 2. Kirigami inspired patterns [1]
Reference
[1] Shyu, T. C., Damasceno, P. F., Dodd, P. M., Lamoureux, A., Xu, L., Shlian, M., … & Kotov, N. A. (2015). A kirigami approach to engineering elasticity in nanocomposites through patterned defects. Nature materials, 14(8), 785-789.
. - 12. Depth of anaesthesia monitoring in veterinary species: development of an automatic Jaw Tone measuring Device (JTD)
- Amine Benouhiba
A correct depth of anaesthesia (DoA) assessment during surgical procedures is of paramount importance to avoid the occurrence of intraoperative awareness. In veterinary species, DoA evaluation is mainly based on clinical parameters. Among them, the “jaw tone” (estimation of the passive resistance present during manual opening of the jaw) has a pivotal role. However, surprisingly, no tools to quantitatively measure it has been developed so far.
In continuation of this ongoing project, the student will persist in advancing the design and creation of a tool aimed at quantitatively measuring jaw tone and assessing the response to jaw opening in anesthetized small animal species, such as dogs and cats. Additionally, there are plans for its clinical application and exploration in an authentic clinical environment through collaboration with the Anaesthesiology Section of the Vetsuisse Faculty at the University of Bern.
.